深度学习-11
不变性
- 卷积神经网络正是将空间不变性(spatial invariance)的这一概念系统化,从而基于这个模型使用较少的参数来学习有用的表示。
适合于计算机视觉的神经网络结构:
- 平移不变性(translation invariance):不管检测对象出现在图像中的哪个位置,神经网络的前面几层应该对相同的图像区域具有相似的反应,即为“平移不变性”。
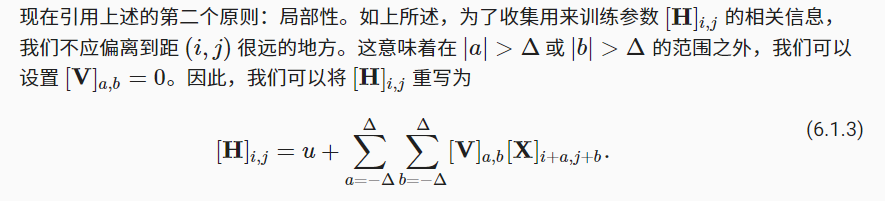
- 局部性(locality):神经网络的前面几层应该只探索输入图像中的局部区域,而不过度在意图像中相隔较远区域的关系,这就是“局部性”原则。最终,在后续神经网络,整个图像级别上可以集成这些局部特征用于预测。
限制多层感知机
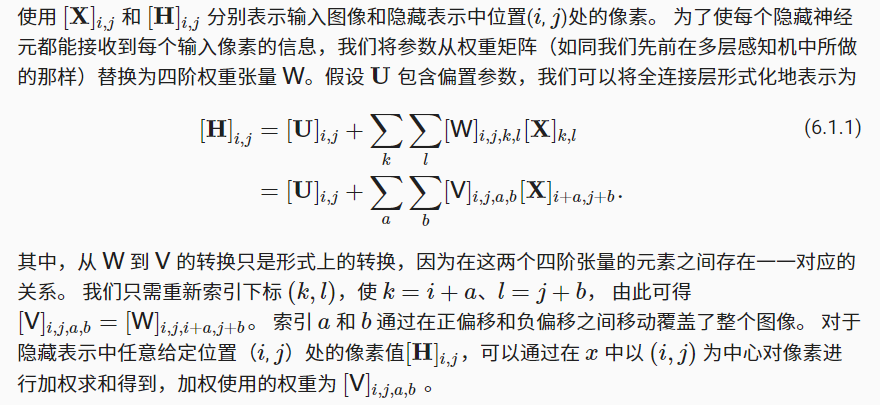
- 多层感知机的输入:二维图像\(X\)
- 隐藏表示\(H\)是一个矩阵,代码中表示为二维张量,其中X和H具有相同的形状
- 可以认为,无论是输入还是隐藏表示都拥有空间结构
平移不变性
- 意味着检测对象在输入\(X\)中的平移,应该仅仅导致隐藏表示\(H\)中的平移
- 也就是说,\(V\)和\(U\)实际上不依赖于\((i, j)\)的值,即\([V]_{i,j,a,b}=[V]_{a,b}\)
- 并且U是一个常数,比如u,所以可以将H定义简化为


局部性
- (6.1.3)是一个 卷积层 (convolutional layer),而卷积神经网络是包含卷积层的一类特殊的神经网络。
- \(V\)被称为卷积核 (convolution kernel) 或者 滤波器 (filter),它仅仅是可学习的一个层的权重。
卷积神经网络和多层感知机的训练差异:
- 以前,多层感知机可能需要数十亿个参数来表示网络中的一层,而现在卷积神经网络通常只需要几百个参数,而且不需要改变输入或隐藏表示的维数。
- 参数大幅减少的代价是,我们的特征现在是平移不变的,并且当确定每个隐藏激活的值时,每一层只能包含局部的信息。
- 以上所有的权重学习都将依赖于归纳偏置
- 当这种偏置与现实相符时,我们就能得到样本有效的模型,并且这些模型能很好地泛化到未知数据中
- 如果这偏置与现实不符时,比如当图像不满足平移不变时,我们的模型可能难以拟合我们的训练数据
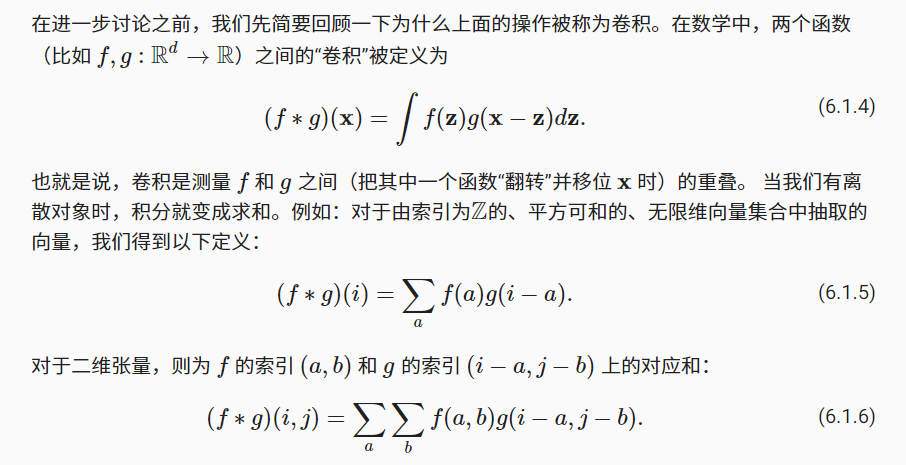
卷积
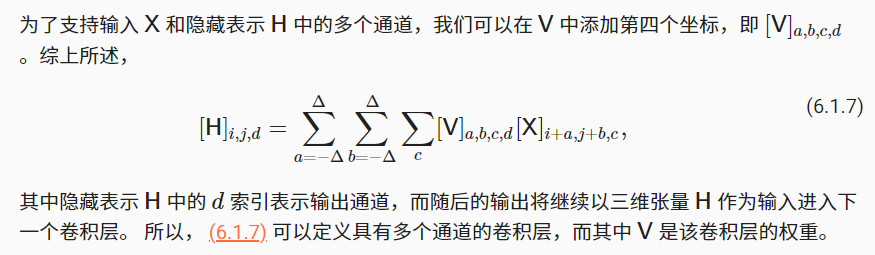
通道
- 图像不是二维张量,而是一个由高度、宽度和颜色组成的三维张量,比如包含1024×1024×3 个像素。
- 前两个轴与像素的空间位置有关,而第三个轴可以看作是每个像素的多维表示。
- 因此,我们将 XX索引为$ [X]_{i,j,k}$ 。由此卷积相应地调整为 \([V]_{a,b,c}\) ,而不是 \([V]_{a,b}\)
- 由于输入图像是三维的,我们的隐藏表示 H 也最好采用三维张量。
- 我们可以把隐藏表示想象为一系列具有二维张量的 通道 (channel)。 这些通道有时也被称为 特征映射 (feature maps),因为每个通道都向后续层提供一组空间化的学习特征。
- 直观上你可以想象在靠近输入的底层,一些通道专门识别边,而其他通道专门识别纹理。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Yeの博客!